三维重建技术通过深度数据获取、预处理、点云配准与融合、生成表面等过程,把真实场景刻画成符合计算机逻辑表达的数学模型。这种模型可以对如文物保护、游戏开发、建筑设计、临床医学等研究起到辅助的作用。三维重建技术的重点在于如何获取目标场景或物体的深度信息。在景物深度信息已知的条件下,只需要经过点云数据的配准及融合,即可实现景物的三维重建。
主动式三维重建技术之三角测距法
三角测距法是一种非接触式的测距方法,以三角测量原理为基础。红外设备以一定的角度向物体投射红外线,3d建模云计算,光遇到物体后发生反射并被CCD(Charge-coupled Device,电荷耦合元件)图像传感器所检测。随着目标物体的移动,此时获取的反射光线也会产生相应的偏移值。根据发射角度、偏移距离、中心矩值和位置关系,3d云建模,便能计算出发射qi到物体之间的距离。三角测距法在测量、地形勘探等领域中应用广泛。
半稠密重建:
通常是重建图像纹理或梯度比较明显的区域,这些区域特征比较鲜明。半稠密重建在直接法视觉SLAM里比较常见。重建的三维点云相对稠密,云建模,可以满足部分应用需求。
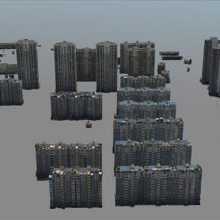
稠密重建:
稠密重建是对整个图像或者图像中的绝大部分像素进行重建。与稀疏、半稠密相比,稠密重建对场景的三维信息理解更quan面,更能符合应用需求。但是,由于要重建的点云数量太多,相对耗时。
武汉大势智慧科技有限公司 手机:𐂛𐂜𐂝𐂞𐂛𐂟𐂠𐂜𐂡𐂜𐂠 电话:𐂝𐂢𐂞𐂣𐂤𐂡𐂟𐂥𐂥𐂜𐂛𐂛 地址:湖北 武汉 湖北省武汉市江夏区光谷大道77号金融港B2栋4层