常见的三维重建表达方式
深度图其每个像素值代表的是物体到相机xy平面的距离,单位为 mm。
体素是三维空间中的一个有大小的点,一个小方块,相当于是三维空间种的像素。
点云是某个坐标系下的点的数据集。点包含了丰富的信息,包括三维坐标X,Y,Z、颜色、分类值、强度值、时间等等。在我看来点云可以将现实世界原子化,通过高精度的点云数据可以还原现实世界。万物皆点云,获取方式可通过三维激光扫描等。
大势智慧是一家专注于真实世界三维数字化重建及三维数据服务的高新技术企业,公司在城市高精度三维建模、模型应用及语义化理解和文化遗产数字化保护领域具有***的技术优势和丰富实践经验。
三维重建是科研的前沿热点问题,也是计算机视觉、计算机图形学以及虚拟现实等领域中的共性科学问题与核1心技术。 基于图像的三位重建融合了计算机视觉、数字图像处理和计算机图形学等多门学科的知识,是一套非常复杂的工程系统,涉及知识点多且杂,初学者不仅要具备深厚的数学功底,同时也需要熟练的C﹨C++编程能力,实景三维,相较于其他视觉领域,三维重建的入门门槛要高很多。
大势智慧是一家专注于真实世界三维数字化重建及三维数据服务的高新技术企业,公司在城市高精度三维建模、模型应用及语义化理解和文化遗产数字化保护领域具有***的技术优势和丰富实践经验。
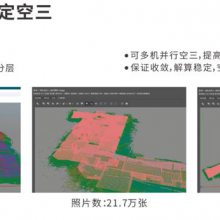
双目视觉和多目视觉理论上可准确的恢复深度信息,但实际中,受拍摄条件的影响,精度无法得到***。单目视觉只使用单一摄像机作为采集设备,具有低成本、易部署等优点,但其存在固有的问题:单张图像可能对应无数真实物理世界场景(病态),故使用单目视觉方法从图像中估计深度进而实现三维重建的难度较大。
武汉大势智慧科技有限公司 手机: 电话: 地址:湖北 武汉 湖北省武汉市江夏区光谷大道77号金融港B2栋4层