PCL(Point Cloud Library)是在吸收了前人点云相关研究基础上建立起来的大型跨平台开源C++编程库,它实现了大量点云相关的通用算法和gao效数据结构,云建模系统,涉及到点云获取、滤波、分割、配准、检索、特征提取、识别、追zong、曲面重建、可视化等。支持多种操作系统平台,可在Windows、Linux、Android、Mac OS X、部分嵌入式实时系统上运行。
PCL是一个模块化的C++模板库,其基于以下第三方库:Boost、Eigen、FLANN、VTK、CUDA、OpenNI、Qhull,实现点云相关的获取、滤波、分割、配准、检索、特征提取、识别、追zong、曲面重建、可视化等。
大势智慧是一家专注于真实世界三维数字化重建及三维数据服务的高新技术企业,云建模,公司在城市高精度三维建模、模型应用及语义化理解和文化遗产数字化保护领域具有***的技术优势和丰富实践经验。
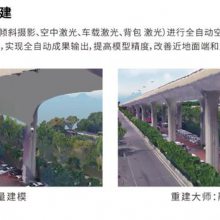
在计算机视觉中, 三维重建是指根据单视图或者多视图的图像重建三维信息的过程. 由于单视频的信息不完全,因此三维重建需要利用经验知识. 而多视图的三维重建(类似人的双目定位)相对比较容易,在线三维建模, 其方法是先对摄像机进行标定, 即计算出摄像机的图象坐标系与世界坐标系的关系.然后利用多个二维图象中的信息重建出三维信息。
SDF值等于此体素到重建表面的zui小距离值。当SDF值大于零,表示该体素在表面前;当SDF小于零时,云建模服务,表示该体素在表面后;当SDF值越接近于零,表示该体素越贴近于场景的真实表面。KinectFusion技术虽然对场景的重建具有gao效实时的性能,但是其可重建的空间范围却较小,主要体现在消耗了***的空间用来存取数目繁多的体素。
为了解决体素占用大量空间的问题,Curless等人提出了TSDF (Truncated Signed Distance Field,截断符号距离场)算法,该方法只存储距真实表面较近的数层体素,而非所有体素。因此能够大幅降低KinectFusion的内存消耗,减少模型冗余点。
武汉大势智慧科技有限公司 手机:𐃲𐃳𐃴𐃵𐃲𐃶𐃷𐃳𐃸𐃳𐃷 电话:𐃴𐃹𐃵𐃺𐃸𐃶𐃳𐃲𐃲 地址:湖北 武汉 湖北省武汉市江夏区光谷大道77号金融港B2栋4层