在计算机视觉中, 三维重建是指根据单视图或者多视图的图像重建三维信息的过程. 由于单视频的信息不完全,因此三维重建需要利用经验知识. 而多视图的三维重建(类似人的双目定位)相对比较容易, 其方法是先对摄像机进行标定, 即计算出摄像机的图象坐标系与世界坐标系的关系.然后利用多个二维图象中的信息重建出三维信息。常规的3D shape representation有以下四种:深度图(depth)、点云(point cloud)、体素(voxel)、网格(mesh)。
大势智慧是一家专注于真实世界三维数字化重建及三维数据服务的高新技术企业,云建模,公司在城市高精度三维建模、模型应用及语义化理解和文化遗产数字化保护领域具有***的技术优势和丰富实践经验。
PCL部分常用的算法模块:
libpcl I/O:完成数据的输入、输出过程,三维云建模,如点云数据的读写;
libpcl filters:完成数据采样、特征提取、参数拟合等过程;
libpcl register:完成深度图像的配准过程,例如迭代zui近点算法;
libpcl surface:完成三维模型的表面生成过程,包括三角网格化、表面平滑等。
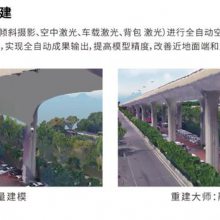
3D建模的原理
3D建模的过程实际上是一个三维重建过程,这个过程包括点云数据预处理、分割、三角网格化、网格渲染。
由于激光扫描获取的数据中常常伴有杂点或噪声,影响了后续的处理,因此为了获取完整的模型,云建模软件,需要对点云数据进行一定的预处理,常用的方法有滤波去噪、数据精简、数据插补等。
分割是指将整个点云聚类为多个点云,3d建模云计算,每个点云对应独立的物体对象。分割算法大体上是先选定一个点,利用kd树计算以该点为中心的球,球内的点都属于该物体,球的半径设为一个阈值,之后遍历该物体的其他点都这么处理,会将点云分割成一个一个的物体。
为了便于后续的网格渲染,需要提前将点云进行三角网格化,采用的算法通常是凸包或凹包算法。
以上几步基本上已经得出了点云的空间拓扑结构,要得到逼真的物体,还需要网格渲染。网格渲染主要为纹理映射,就是将数码相机中的图像望网格上贴。
经过以上几步就完成了整个3D建模。
武汉大势智慧科技有限公司 手机:𐃣𐃤𐃥𐃦𐃣𐃧𐃨𐃤𐃩𐃤𐃨 电话:𐃥𐃪𐃦𐃫𐃬𐃩𐃧𐃭𐃭𐃤𐃣𐃣 地址:湖北 武汉 湖北省武汉市江夏区光谷大道77号金融港B2栋4层