飞行时间法(Time of Flight,ToF)指的是在光速及声速一定的前提下,集群建模,通过测量发射信号与接收信号的飞行时间间隔来获得距离的方法。这种信号可以是超声波,也可以是红外线等。飞行时间法相较于立体视觉法而言,具有不受基线长度限制、与纹理无关、成像速度快等特点。但是其也有一定的缺点。首先,ToF相机的分辨率非常低。其次,ToF相机容易受到环境因素的影响,如混合像素、外界光源等,导致景物深度不准确;系统误差与随机误差对测量结果的影响很大,需要进行后期数据处理,主要体现在场景像素点的位置重合上。
SLAM和三维重建有什么区别?
SLAM:同步定位与地图构建;定谁的位?相机的位,相机在机器人身上,就是定机器人的位。建谁的地图?相机经过地方的地图。二者结合,集群建模软件价格,才能确定机器人在某个地图中的具体位置,和这个场景(地图)下的连续运动轨迹。
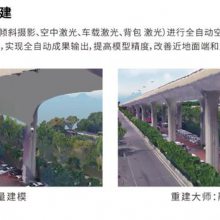
三维重建(SFM):从运动恢复结构。我觉得更像是构建目标的三维模型。
libpcl filters:如采样、去除离群点、特征提取、拟合估计等数据实现过滤器;
libpcl features:实现多种三维特征,如曲面法线、曲率、边界点估计、矩不变量、主曲率,PFH和FPFH特征,旋转图像、积分图像,NARF描述子,实景三维集群建模,RIFT,相对标准偏差,数据强度的筛选等等;
libpcl I/O:实现数据的输入和输出操作,例如点云数据文件(PCD)的读写;
libpcl segmentation:实现聚类提取,如通过采样一致性方法对一系列参数模型(如平面、柱面、球面、直线等)进行模型拟合点云分割提取,集群建模软件,提取多边形棱镜内部点云等等;
libpcl surface:实现表面重建技术,如网格重建、凸包重建、移动zui小二乘法平滑等;
libpcl register:实现点云配准方法,如ICP等;
libpclkeypoints:实现不同的关键点的提取方法,这可以用来作为预处理步骤,决定在哪儿提取特征描述符;
libpcl range :实现支持不同点云数据集生成的范围图像。
武汉大势智慧科技有限公司 手机:𐃎𐃏𐃐𐃑𐃎𐃒𐃓𐃏𐃔𐃏𐃓 电话:𐃐𐃕𐃑𐃖𐃗𐃔𐃒𐃘𐃘𐃏𐃎𐃎 地址:湖北 武汉 湖北省武汉市江夏区光谷大道77号金融港B2栋4层